基本画面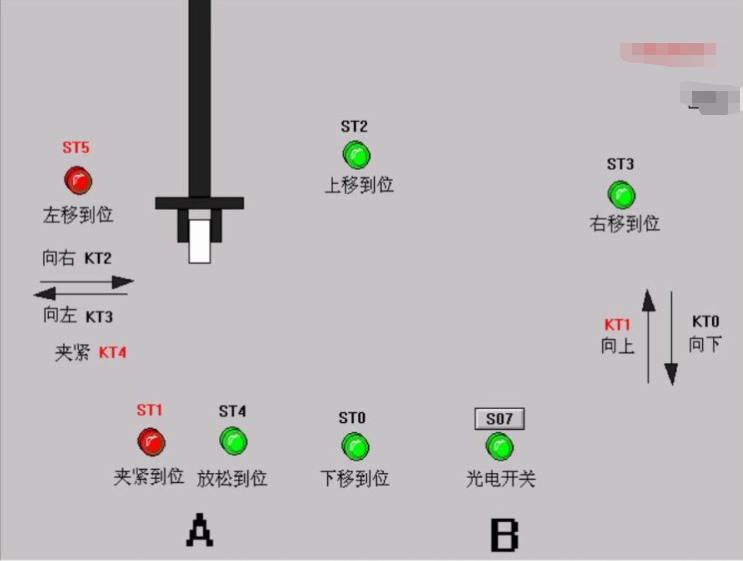
控制要求1、机械手“取与放”搬运系统,定义原点为左上方所达到的极限位置,其左限位开关闭合,上限位开关闭合,机械手处于放松状态。 2、搬运过程是机械手把工件从A处搬到B处。 3、上升和下降,左移和右移均由电磁阀驱动气缸来实现。 4、当工件处于B处上方准备下放时,为确保安全,用光电开关检测B处有无工件。只有在B处无工件时才能发出下放信号。 5、机械手工作过程:启动机械手下降到A处位置一夹紧工件一夹住工件上升到顶端一机械手横向移动到右端,进行光电检测一下降到B处位置一机械手放松,把工件放到B处一机械手上升到顶端一机械手横向移动返回到左端原点处。 设计要求3、按工艺要求画出控制流程图: 4、写出梯形图程序; 5、用三菱系列PLC编程; 6、实物接线。 流程图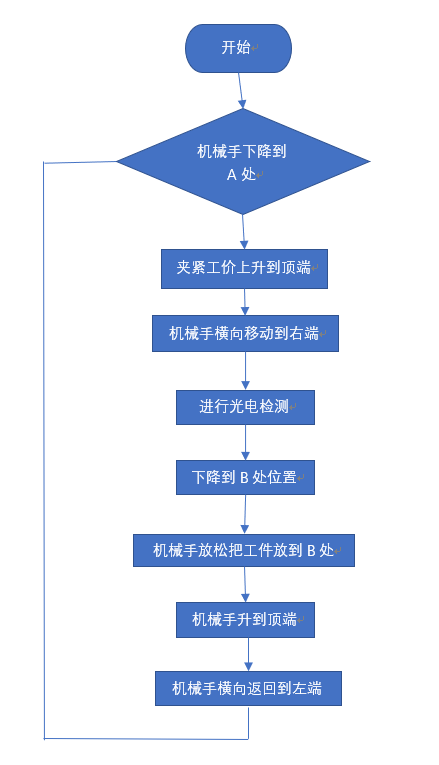
原理图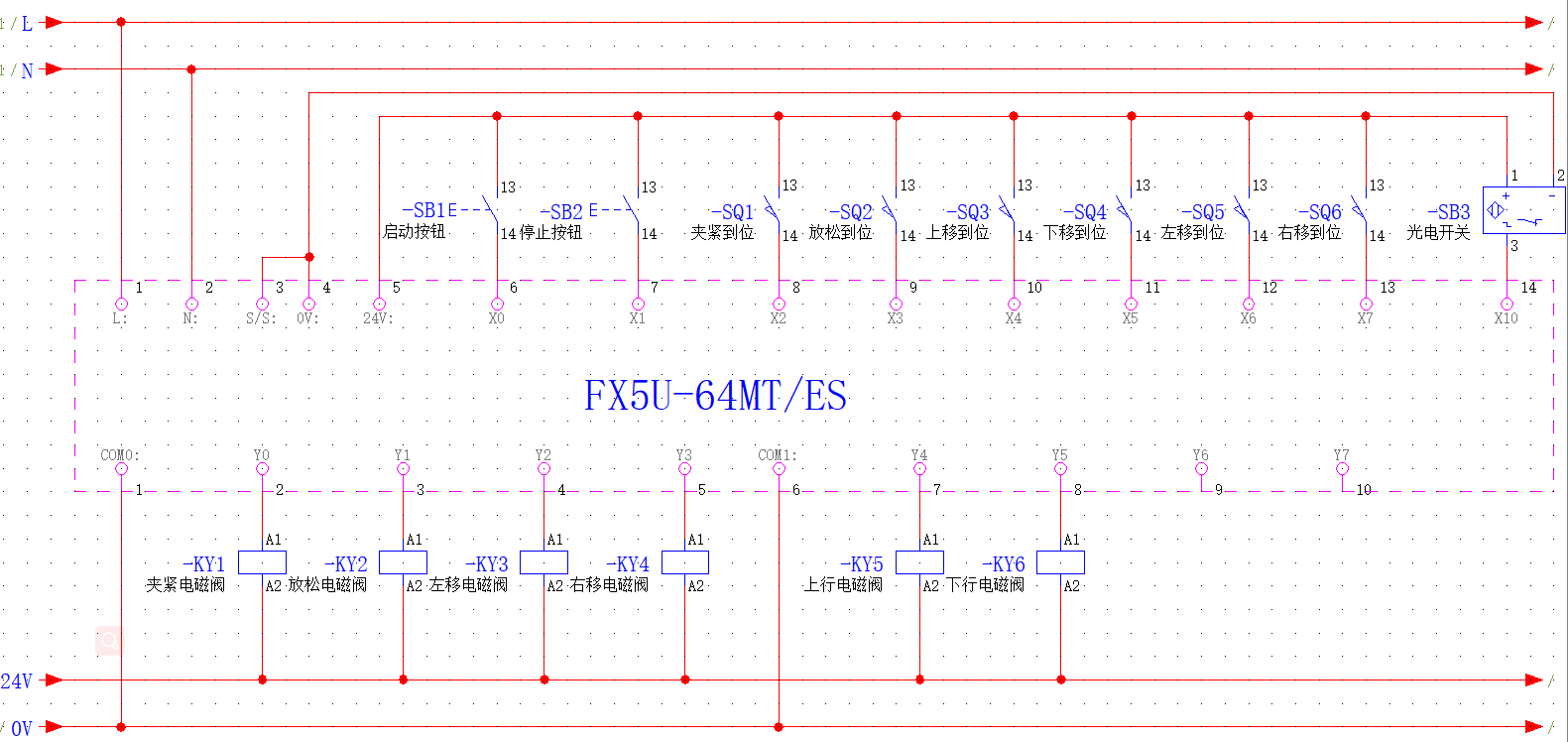
元器件选型1、FX5U-64MT/ES 
2、PNP 光电开关 
3、按钮 
4、电磁阀 
5、行程开关 
I/O点表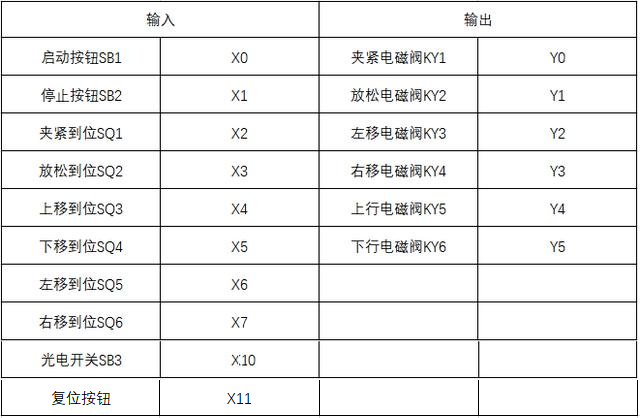
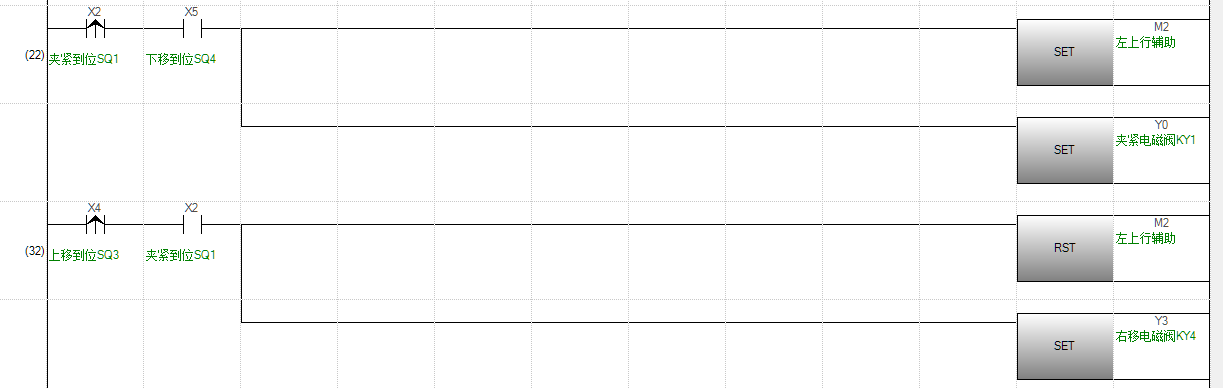
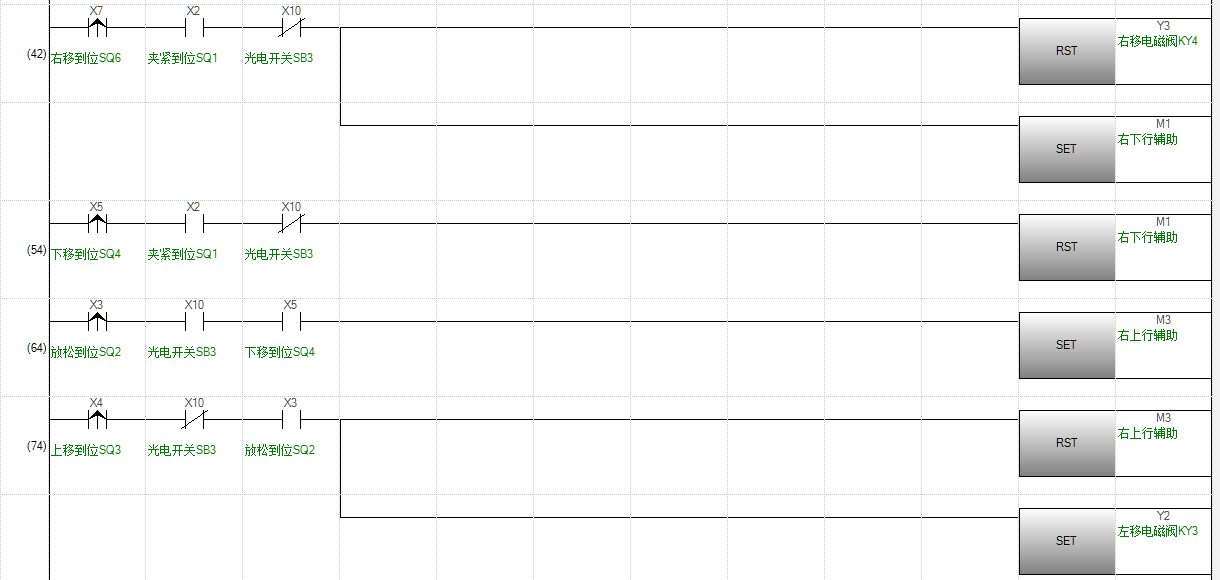
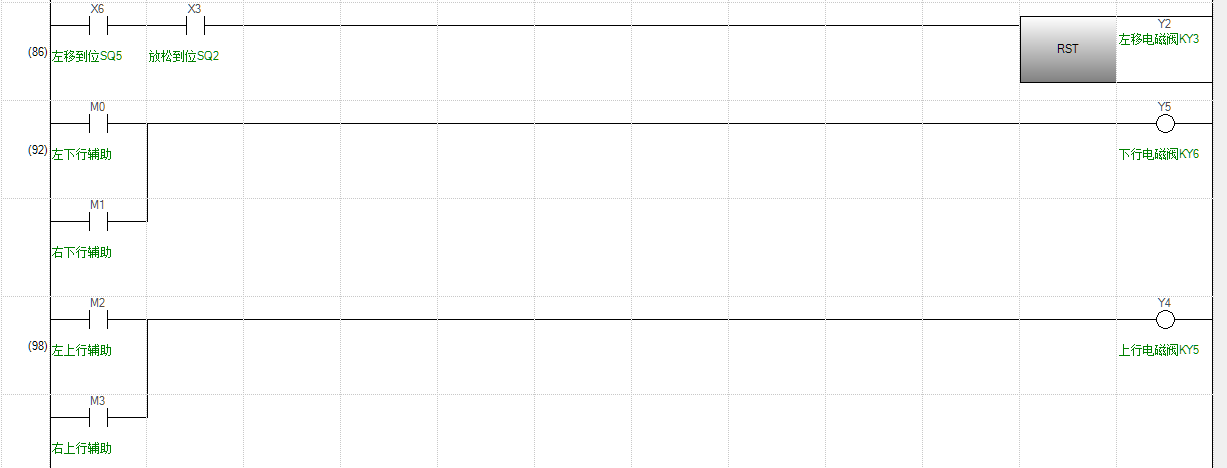
程序梯形图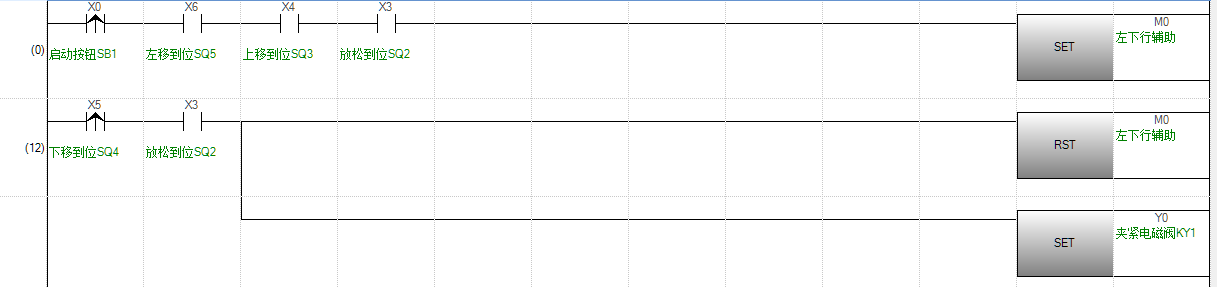
思考A、机械手连续循环与单次循环可按S04自锁按钮进行选择, 当S04为“0"时机械手连续循环,当S04为"1"时机械手单次循环; B、机械手连续循环,按停止按钮S02机械手立即停止;当再按启动按钮S01,机械手继续运行; C、连续作3次循环后自动停止,中途按停止按钮S02机械手完成一次循环后才能停止;
| 
 /1
/1 
 |手机版|免责声明|本站介绍|工控课堂
( 沪ICP备20008691号-1 )
|手机版|免责声明|本站介绍|工控课堂
( 沪ICP备20008691号-1 )
 发表于 2021-3-12 22:08:08
发表于 2021-3-12 22:08:08
 提升卡
提升卡 置顶卡
置顶卡 照妖镜
照妖镜 发表于 2021-3-13 12:24:07
发表于 2021-3-13 12:24:07
