Q172DSCPU在汽车生产线中的应用
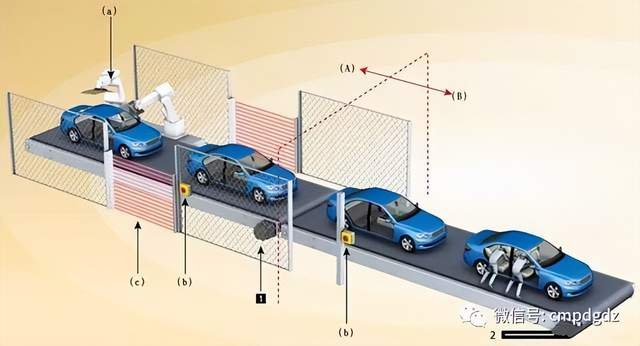
该案例适用于各种生产线设备、压入机、冲压机、印刷机、立式成型充填封口机、卧式成型充填封口机等。 1 传送带驱动轴1 2 传送带驱动轴2 (A) 玻璃窗安装工程(无人) (B) 安装座位工程(有人) (a) 玻璃窗安装机械手 (b) 紧急停止按钮 (c) 光幕
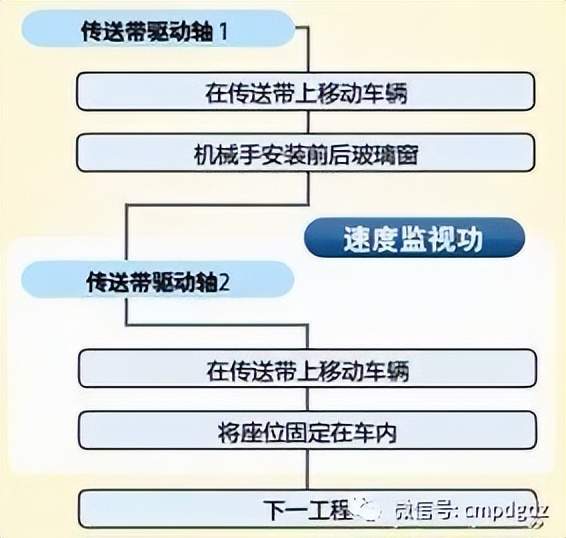
动作流程 现场课题
课题01如有人进入无人组装生产线,会停止---解决课题:切断功能。 课题02有人组装生产线中,希望确保安全的速度---速度监视功能。
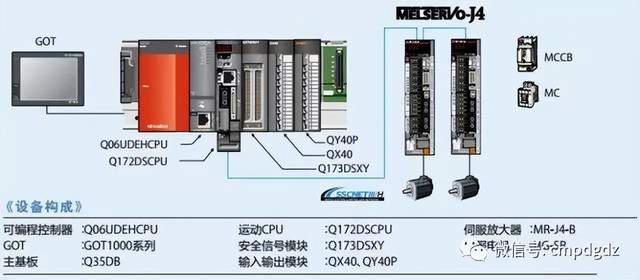
模型系统 解决现场课题
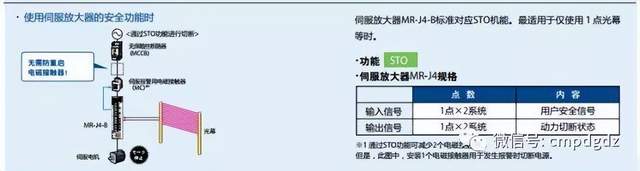
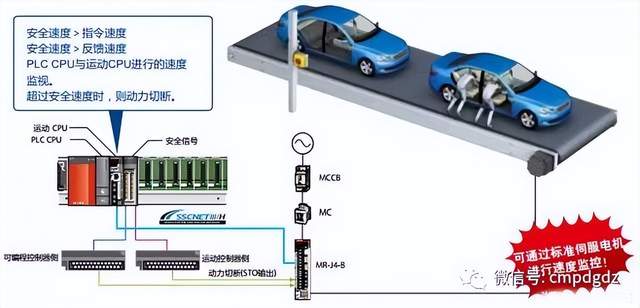
解决01切断功能:通过充实安全功能,构建用途对应的安全系统。 解决02速度监控功能(SLS):通过速度监视确保生产线的安全性。
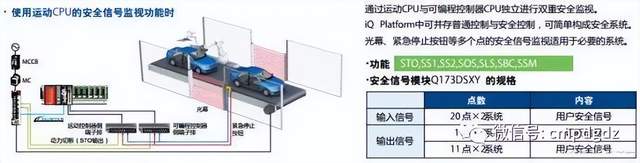
速度监视功能(SLS)是监视电机速度是否超过安全速度的监视功能。通过将指令速度与反馈速度与安全速度相比,保证安全速度。异常时,通过STO或SS1切断动力。 启动步骤
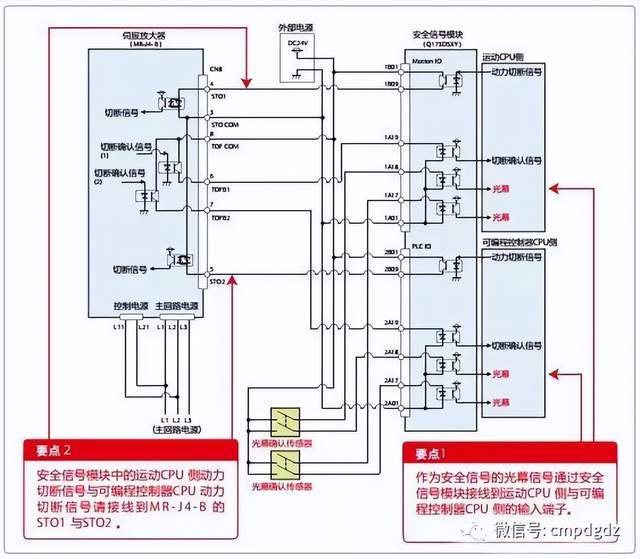
步骤1:安全信号的接线
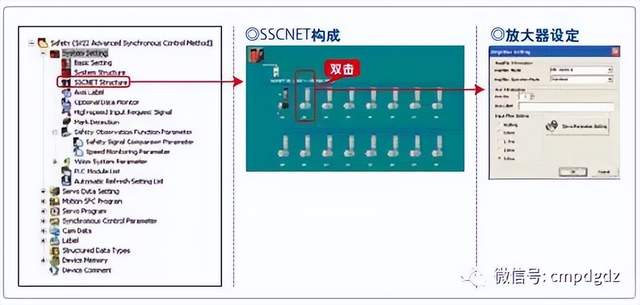
使用安全信号模块时的安全系统接线示例。光幕的信号连接到安全信号模块的输入端子,安全信号模块的输出端子连接到伺服放大器的STO端子。 步骤2:系统构成的设定
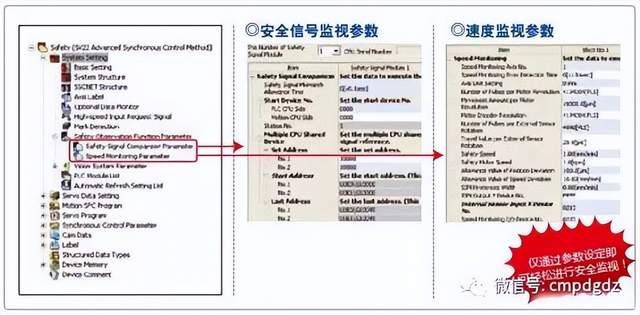
在系统构成画面中进行伺服放大器、伺服电机的设定。 步骤3:安全监视功能参数的设定 通过安全信号参数设定安全信号模块的使用台数,通过速度监视参数设定速度监视轴编号及安全速度等。 Q172DSCPU在搬运设备中的应用
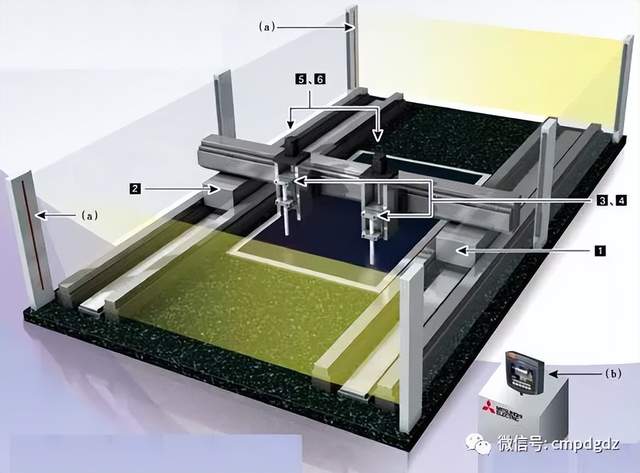
该案例适用于通用材料的搬送设备、自动组装设备、封装机、航空机组装、扫描设备等。 1 X1轴(直线伺服电机) 2 X2轴(直线伺服电机) 3 Y1轴(直线伺服电机) 4 Y2轴(直线伺服电机) 5 Z1轴(上下轴) 6 Z2轴(上下轴) (a) 光幕 (b) GOT(Graphic Operation Terminal)
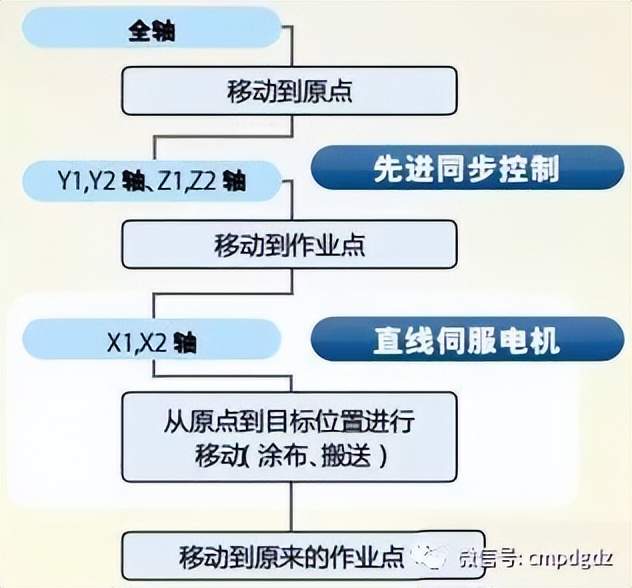
动作流程 现场课题
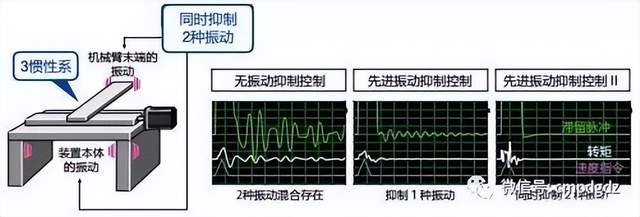
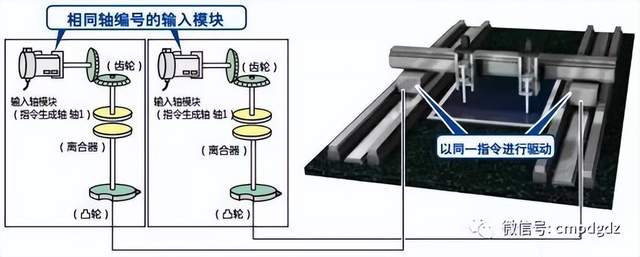
课题01抑制机械的振动---解决课题:先进振动抑制控制Ⅱ与机械共振抑制滤波器。 课题02以简单构造实行多传感头---解决课题:直线伺服电机。 课题03X1轴与X2轴总是进行相同动作----解决课题:串联驱动。
模型系统、
解决现场课题
解决01先进振动抑制控制Ⅱ机械共振抑制滤波器:通过一键式操作,实现先进的振动抑制控制功能。完成伺服增益调整。
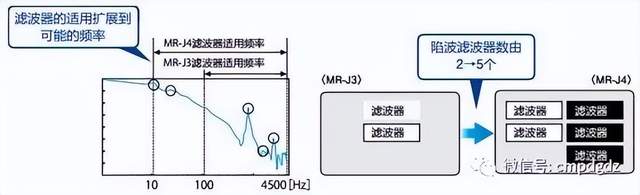
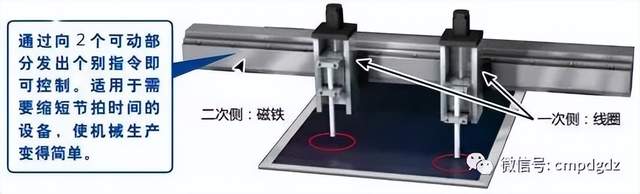
先进振动抑制控制Ⅱ:通过对应3惯性系的机械的振动抑制控制算法,可同时抑制2种低频率振动。通过MR Configurator2也可简单进行调整。可对机械臂顶端或设备主体残留振动的控制发挥出效果。 机械共振抑制滤波器:通过提高滤波器构造,将适用频率范围由100Hz~4500H扩展到10Hz~4500Hz。并且,将可同时适用的滤波器由2个扩展到5个,从而提高机械的振动抑制性能。 解决02直线伺服电机:通过直线伺服电机可随意控制多传感头!
可以使用支持最大速度3m/s(LM-H3系列)、最大推力150N~18000N、最小分解能0.005μm的多串行I/F编码器相应的直线伺服电机的多传感头。 解决03 串联驱动:通过先进同步控制,简单进行串联驱动。
使用先进同步控制,将相同数据输出到凸轮,可实现并列驱动(串联驱动)。 启动步骤
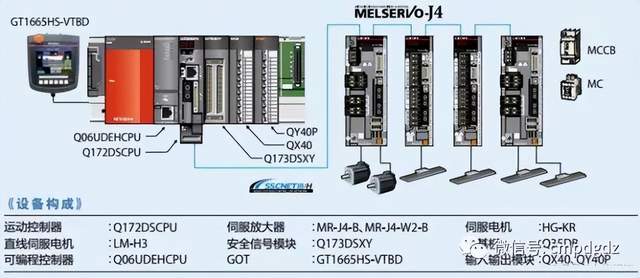
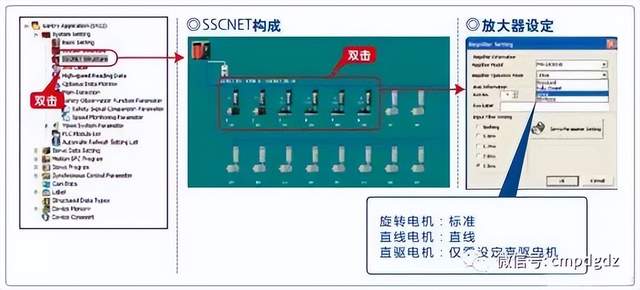
步骤1:系统构成的设定
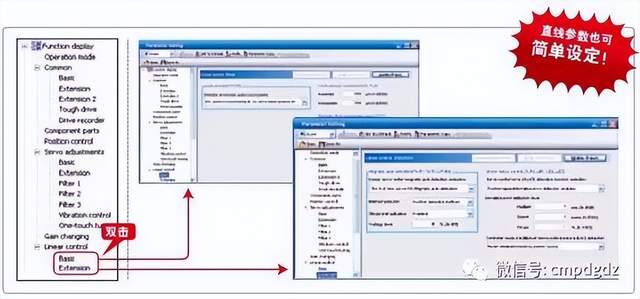
设定伺服放大器、伺服电机。 步骤2:直线控制参数的设定
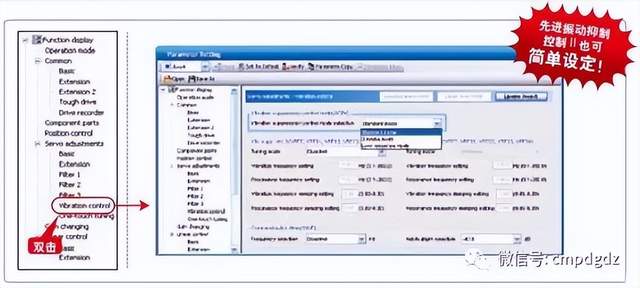
直线伺服电机的参数也仅需设定2画面的数据。 步骤3:振动抑制控制参数的设定
将振动抑制控制模式变为3惯性模式,使先进振动抑制控制Ⅱ有效。 步骤4:程序的编辑
作成运动SFC程序、伺服程序。 QD77MS4在螺丝拧紧机的应用
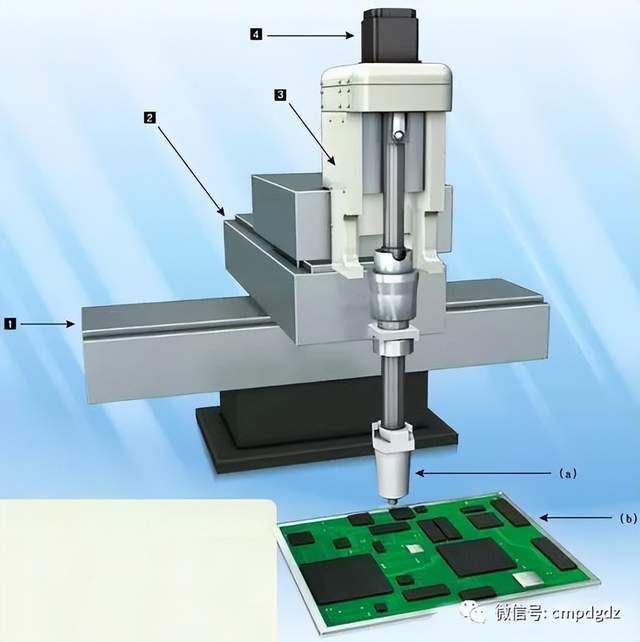
该案例适用于螺帽拧紧机、汽缸盖加固机、离合器加固机、压入机、铆接机等设备。 1 X轴 2 Y轴 3 上下轴(Z轴) 4 旋转轴 (a) 拧紧机 (b) 工件
关闭
站长推荐 /1 /1 
|